随着科技的迅猛进步,移动机器人的控制部分显得格外重要。无线局域网控制技术使得移动机器人能够更加便捷地与主控设备进行信息交流,进而实现高效的操控和监控。那么,这个系统究竟是如何实现这一功能的?
系统设计背景
无线数据传输协议日益完善,无线局域网的传输速度和稳定性显著增强,这为无线技术在机器人领域的应用提供了可能。科研工作者敏锐地察觉到无线通信的诸多优势,立志研发一套专为移动机器人设计的无线局域网控制系统。该系统的目标是实现对移动机器人的远程操控与监控,以提升机器人完成任务的效率。
有了这样的背景和目标,科研人员便开始了系统的整体设计工作。
系统总体架构
该系统由上位机和下位机两部分构成,数据传输是通过搭载OpenWrt系统的无线路由器来实现的。这个无线路由器发射出的无线局域网,充当了连接上位机和移动机器人的纽带。它具备两大通信功能:首先,它可以将网口数据转换成串口数据,从而实现与上位机的通信;其次,它还支持数据的双向传输,使得上位机和移动机器人能够互相交换信息。
科研人员在实际操作中,能够借助无线局域网的特点,使得主机能够远程操控移动机器人,其便捷程度仿佛就在现场操作一般。
无线通信原理
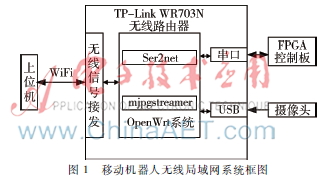
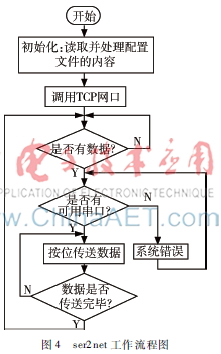
无线局域网的通信基础在于无线路由器发送WiFi信号,以此搭建起通信网络。在此网络环境中,ser2net软件扮演着至关重要的角色,它能够完成网络端口与串口数据之间的转换。上位机通过网口发送指令,这些指令经由ser2net软件从串口转发至移动机器人的FPGA控制板,同时,FPGA控制板也能够沿着这条路径将数据回传至上位机。
这就像是一条信息交流的途径,使得上位机和移动机器人能够顺利地进行“交谈”,确保了系统的稳定运行。
设备选择与修改
挑选OpenWrt系统的无线路由器,看重的是它的开放性和可定制性。通过调整无线路由器内部的软件和硬件参数,可以使其更贴合机器人无线局域网通信系统的需求。具体来说,这些修改可能包括优化网络配置、提升信号稳定性等方面。
科研人员在进行设备挑选与调整时,必须关注设备的功能表现以及与其他组件的相容性,这样才能保证系统的整体运作效率。
系统安装配置
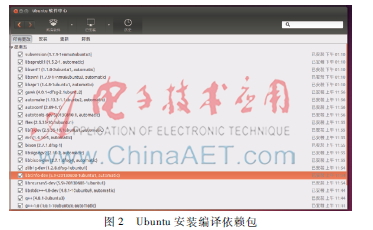
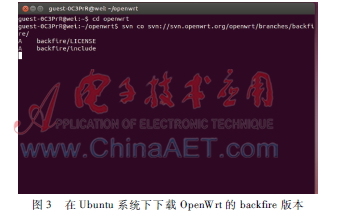
安装配置 OpenWrt 系统是构建系统过程中的关键步骤。首先,必须将 OpenWrt 系统导入到无线路由器。在安装过程中,可能会遭遇一些挑战,比如兼容性问题或是软件包安装失败。遇到这些问题时,就需要借助终端配置等方法来加以解决。
科研人员在安装和配置系统过程中,必须认真执行每一步,保证每项操作都精确到位,只有这样,系统才能顺利运行。
系统调试与实现

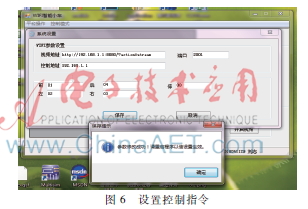
在调试阶段,科研人员首先将无线路由器通过串口转接USB线与电脑相连,随后电脑连接到无线路由器所发射的无线局域网。随后,他们打开上位机软件接入网络,调整控制信号至不同数值,并通过上位机发送控制命令。最后,利用串口调试助手检查无线路由器是否已转发该控制命令。
经过反复的调整和改进,我们最终成功实现了无线局域网系统的所有功能,包括上位机对移动机器人的远程操控与监控。
大家对这种无线局域网控制的移动机器人,在将来可能会有哪些新的应用领域有所好奇吗?欢迎在评论区发表你的见解,同时,别忘了给这篇文章点个赞,以及将它分享出去!